|


| 品牌 | HC |
| 型號 | 可定制 |
| 加工定制 | 是 |



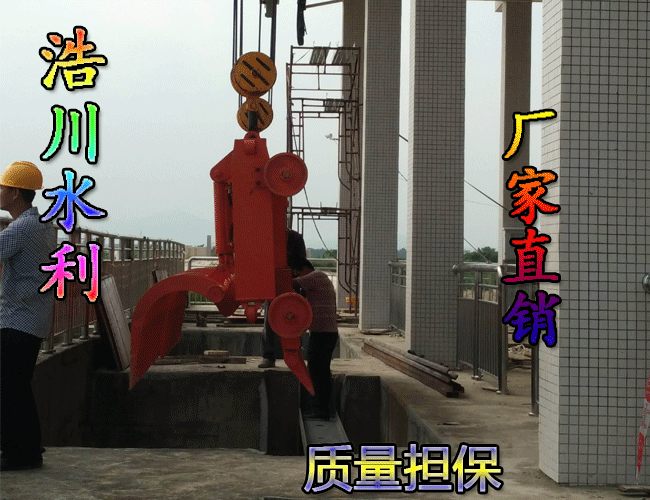
水電站抓斗清污機在清污過程中的兩個主要工作方式是“抓物”和“壓物”。
抓斗清污機“抓污”工作方式主要針對漂浮在水面或淺水層中的污物。其操作過程是:先將抓斗下放,至檢修平臺以下時打開抓斗,繼續(xù)下放抓斗至預定清污位置時(由位置傳感器控制)停止。啟動液壓系統(tǒng),馬達空載運轉(zhuǎn),按“抓斗閉合”按鈕.油缸活塞桿在壓力油作用下前伸,驅(qū)動抓斗閉合,使污物進入斗內(nèi)。閉合到位后由系統(tǒng)內(nèi)設(shè)置的限位保護裝置自動斷開液壓系統(tǒng)電路。再按“抓斗提升”按鈕將其提出塔頂。開動門機大車運行機構(gòu)至卸污地點,再打開抓斗卸污。
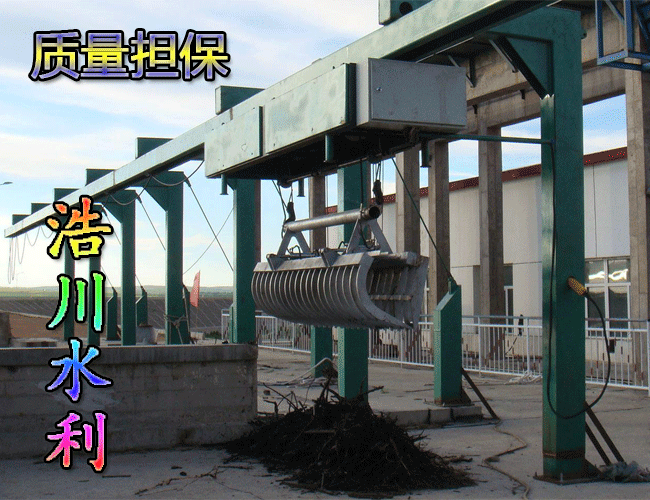
清污機主要由軌道、移動小車、清污耙斗、水下攔污柵、電控系統(tǒng)等部件組成。自動清污機工作原理是通過設(shè)置于移動小車上方的驅(qū)動裝置,帶動小車滑軌道作平面移動,并通過光電數(shù)字模塊感應(yīng)控制技術(shù)確保載重小車在格柵柵面范圍內(nèi)移動的位置準確度。當?shù)竭_預定格柵除渣位置后,利用卷揚機工作原理,載重小車內(nèi)的減速機構(gòu)按照指令啟動,帶動兩組鋼絲繩卷筒,使除渣齒耙在鋼絲繩的牽引下實現(xiàn)上下運動;同時采用同步鏈輪傳動機構(gòu)實現(xiàn)液壓軟管與鋼絲繩卷筒同步運動。當除渣齒耙抵達格柵底部時,預設(shè)高程控制系統(tǒng)發(fā)出停機,并提供液壓系統(tǒng)電機工作指令,使除渣齒耙按照預定的閉合角度關(guān)閉弧形齒耙撈渣,同時指令提升電機提升除渣齒耙;齒耙到達預設(shè)提升高度后,控制系統(tǒng)指令載重小畫移動,將污物送入垃圾儲物倉,由此完成一個格柵清污的過程。

移動式攔污柵清污機開辟了河道攔污柵清污的一種新途徑,既有著存在和發(fā)展的必然性,也有著諸多客觀的運用限制因素。利用其優(yōu)勢,克服其局限,是科學運用和完善該類清污機的*正確選擇。




|
|

|

|